![]()
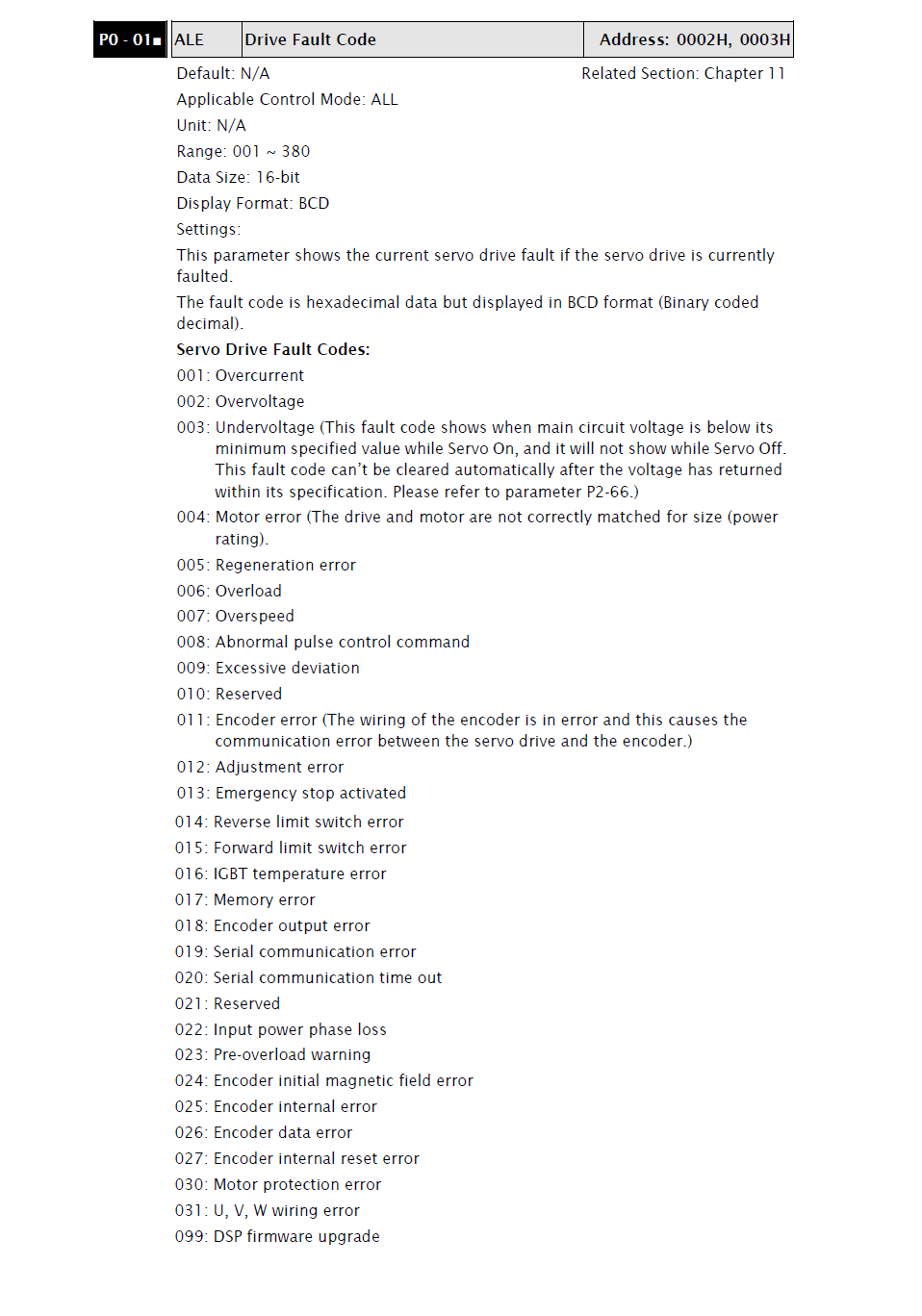
ASDA ERROR CODES
Изтеглете примерната програма Delta Servo Delta PLC тук: Детайли:
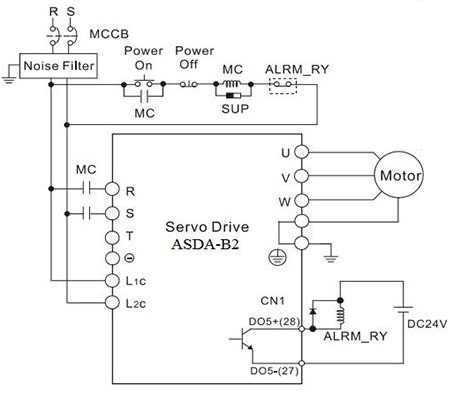
1. Схема на свързване на серво Delta с Delta PLC
- Захранваща връзка за Servo Delta:
+ Захранването е 1P 220 в L1C и L2C, L1C мост през R, L2C мост през S, T е празен.
+ Захранващ кабел 1 щепсел в жака на двигателя, 1 вход на драйвера в реда U, V, W, GND в съответствие с разпоредбите за цвета на кабелите на кабелния заварчик.
+ Краят на проводника на енкодера 1 се включва в жака на двигателя, другият край се включва в жака на драйвера CN2 на Delta Driver Servo.
това обикновено се запоява от дистрибутора при поискване и символа за цвета на проводника.
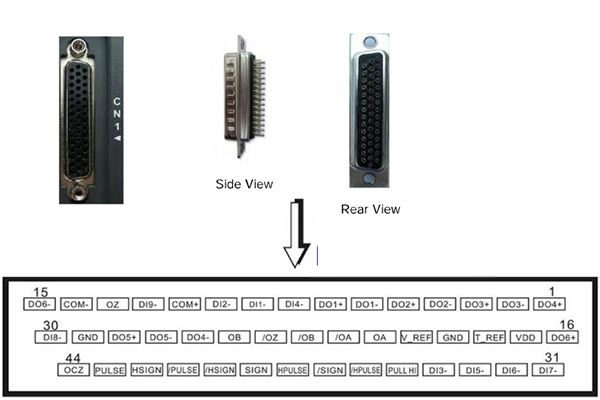
Pin No. Pin Name Функция
1 DO4+ Цифров изход 4
2 DO3- Цифров изход 3
3 DO3+ Цифров изход 3
4 DO2- Цифров изход 2
5 DO2+ Цифров изход 2
6 DO1- Цифров изход 1
7 DO1+ Цифров изход 1
8 DI4- Цифров вход 4
9 DI1- Цифров вход 1 (ServO pin ON)
10 DI2- Цифров вход 2
11 COM+ Вход за захранване (12~24V).
12 DI9- Цифров вход 9
13 OZ енкодер Z импулсен изход на линеен драйвер
14 COM-VDD(24V) заземяване на захранване
15 DO6- Цифров изход 6
16 DO6+ Цифров изход 6
17 VDD +24V изходна мощност (за външен I/O)
18 T_REF Аналогов вход за въртящ момент
19 GND Заземяване на аналогов входен сигнал
20 V_REF Аналогов вход за скорост (+)
21 OA Енкодер А импулсен изход
22 /OA Encoder /A импулсен изход
23 /OB енкодер /B импулсен изход
24 /OZ енкодер /Z импулсен изход
25 OB енкодер B импулсен изход
26 DO4- Цифров изход 4
27 DO5- Цифров изход 5 Грешка пин 1
28 DO5+ Цифров изход 5 Грешка пин 2
29 GND Земя за аналогов входен сигнал
30 DI8- Цифров изход 8
31 DI7- Цифров вход 7
32 DI6- Цифров вход 6
33 DI5- Цифров вход 5
34 DI3- Цифров вход 3
35 PULL HI Приложена импулсна мощност Високоскоростният щифт издърпва мощността при използване на външно захранване)
36 /HPULSE Високоскоростен позиционен импулс (-)
37 /SIGN Знак за позиция (-) Насочващи щифтове за сондиращи PLC
38 HPULSE Високоскоростен позиционен импулс (+)
39 ЗНАК Знак за позиция (+) Насочващ щифт за PLC положителен
40 /HSIGN Знак за високоскоростна позиция (-)
41 /PULSE Импулсен вход (-) Щифтове за получаване на импулс за възбуден PLC
42 HSIGN Знак за високоскоростна позиция (+)
43 PULSE Импулсен вход (+) Пин за получаване на импулс за положителен тригер на PLC
44 OCZ енкодер Z импулс Изход на линеен драйвер
PLC Delta генерира отрицателни импулси, така че използваме импулсни щифтове 41 /PULSE и обратни щифтове 37 /SIGN
и има два най-често срещани типа използване на източник: вътрешен източник и 24Vdc външен източник.
==> Използваме вътрешната схема на захранване, както следва:
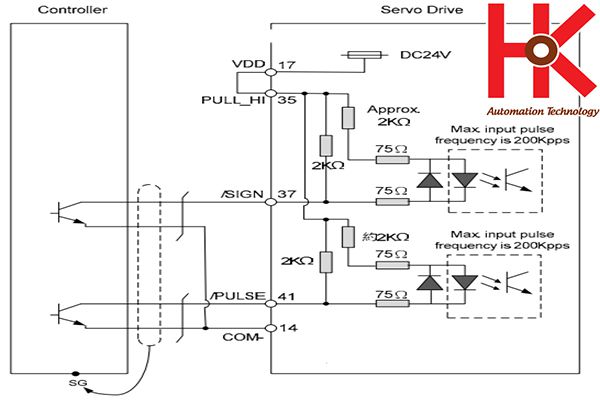
==> Пин 14 към COM0 и COM1 на PLC и се свържете към 0Vdc, Пин 41 към Y0 на PLC Mitsubishi обикновено е щифтът за получаване на импулси,
ако има допълнително предупреждение, запояваме щифт 27 и 28, използваме всяка допълнителна функция,
след което запояваме този щифт като функцията, спомената по-горе, например, Servo On е пин 9 DI1.
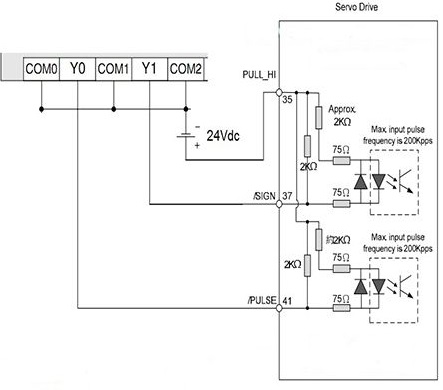
==> Ние използваме външната схема на свързване на 24vdc захранване, както следва:
2. Инсталирайте Delta Servo Driver
- Стъпка 1: Свържете серво мотора към устройството и продължете към захранването на устройството.
- Стъпка 2: Достъп до параметър P2-08, настройте го на 10, изчакайте Drive Servo да завърши процеса на нулиране на параметрите.
- Стъпка 3: Изключете захранването за повече от 1 минута, така че кондензаторът да разреди цялото захранване и след това върнете захранването към устройството.
- Стъпка 4: Ако Servo докладва AL013, получаваме достъп до параметри P2-15=122, P2-16=123, P2-17=121. Това е предупреждение за сигнал за аварийно спиране. Когато са зададени както горните параметри, сервото ще игнорира този сигнал.
- Стъпка 5: Проверете параметър P1-00, ако е различен от 2, нулирайте на 2, за да изберете режим на генериране на импулси от Y0 към серво и порт Y1 за обръщане на серво. (Изчислено според схемата на свързване по-горе).
- Стъпка 6: ON Servo, ако сервото не е заключило вала на двигателя, трябва да проверим параметър P2-10, обикновено, когато по подразбиране той ще бъде 101, сега, ако искаме Servo ON, задаваме P2-10 = 001 Пин 9 DI1 серво включване може да се използва за външен жак.
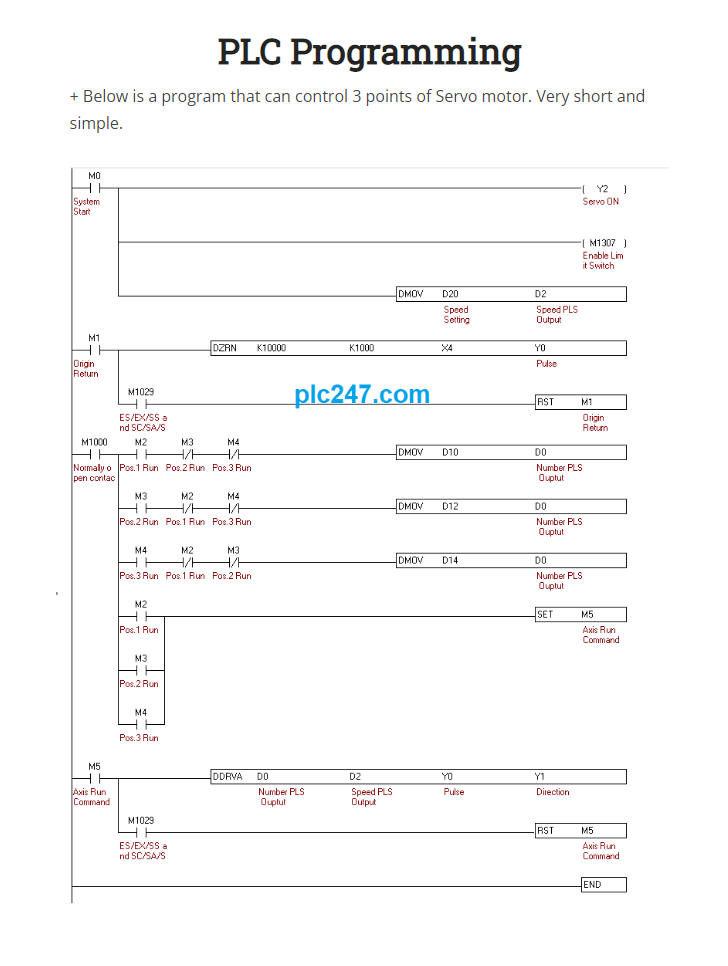
3. Delta PLC програмиране Pulse
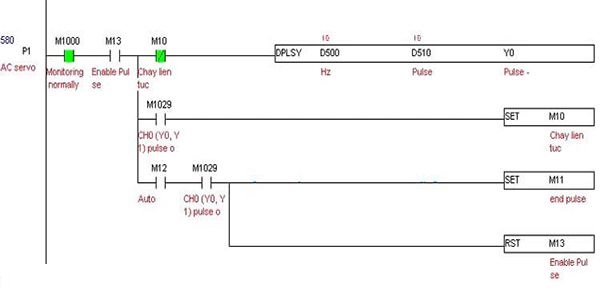
§ P1 е подпрограма P1, наречена от програмиста като AC Servo.
§ M1000 е битът, който винаги е включен, когато PLC RUN - използва се за улесняване на въвеждането на инструкцията, като се избягва случай на безусловно.
§ M13 е битът за спомагателно реле в програмата и се настройва от програмиста, за да позволи изпълнението на импулсна инструкция.
§ M10 е битът на спомагателното реле в програмата и се настройва от програмиста, за да позволи непрекъснато генериране на импулси, без ограничение на броя на импулсите.
§ M1029 е битът за релето на състоянието в програмата и автоматично се ВКЛЮЧВА от PLC, когато импулсната команда генерира необходимия брой импулси
§ (В режим на ограничено генериране на импулси) и не се ВКЛЮЧВА, когато работи непрекъснато.
§ M12 е битът на спомагателното реле в програмата и се настройва от програмиста за автоматичен режим.
§ В горния пример за програмиране ние се интересуваме само от импулсната команда и завършения бит за състоянието на импулса.
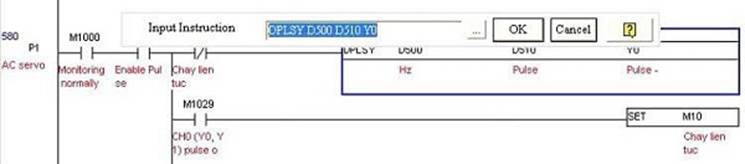
В прозореца на програмния редактор под формата на Ladder програмистът просто трябва да напише директно командата: DPLSY D500 D510 Y0
§ Буквата D означава двоен тип, използваните регистри за данни ще бъдат сдвоени, за да станат по-голям регистър.
§ Горният пример: D500 е 16-битов регистър с PLC Delta, когато се използва в инструкция с Double, той ще бъде свързан с регистър след D501, за да стане 32-битов регистър.
§ Тогава D501 и D500 ще станат 1 регистър и ще бъдат разделени на 2 части, съдържащи се в D501 и D500 под формата на нисък байт и висок байт.
§ Буквата PLSY е символът на командата за правоъгълен импулс в PLC с Y изход.
§ D500-D501 (Двойно) : Регистър, съдържащ стойността на честотата на импулса, в цели Hz единици.
§ D510-D511 (Двойно) : Регистър, съдържащ броя импулси, които ще бъдат излъчени на импулсния изход.
§ Y0 е адресът на изход Y0, където ще се генерира импулсът. В зависимост от вида на PLC, изборът на импулсен изход е посочен в документа.
§ M1029 е битът на състоянието на PLC: Когато M1029 е ВКЛЮЧЕНО, това означава, че импулсната команда на изход Y0 е изпратила достатъчно импулси в регистъра D510-D511.
§ Ако D510-D511 = 0, тогава PLC няма да разбере в смисъл, че броят на излъчените импулси е = 0. PLC ще интерпретира обратното като непрекъснат, неограничен импулс.
Забележка: всеки тип PLC ще бъде ограничен до скоростта на импулсния изход и броя на изходите, разрешени за генериране на различни импулси.
Програмистите трябва внимателно да прочетат документацията на PLC, когато избират.
Отнася се за :
DVP14SS211T : 10kHz импулсен изход, DVP12SC11T : 100kHz импулсен изход DVP28SV11T : 200kHz импулсен изход
Освен това е необходимо да се обърне внимание, че с импулсен изход избраният PLC трябва да бъде транзисторен изход, а не релеен.
Кога влиза в сила импулсната команда?
Когато условието за програмиране е задоволително, вижте примерната фигура по-долу:

Как да разбера, че PLC има завършени и прекратени импулси?
Както е посочено по-горе, битът M1029 ще покаже края на импулсната команда, когато броят на импулсите е различно от нула число и е равен на стойността, съхранена в регистъра, съдържащ броя на излъчените импулси ( D510 ).
Програмистът може програмно да провери състоянието на бита M1029, за да потвърди, че генерирането на импулси е приключило.
Например, когато програмираме опаковъчна машина с дължина на торба, еквивалентна на 5000 импулса, ние използваме горната команда и зареждаме импулсната изходна стойност K5000 в регистъра D510, скоростта зависи от заявката и се преобразува в Hz зареден регистър D500.
Когато стойността е заредена, задайте ON бит M111, PLC ще извърши генериране на импулс на изход Y0, а когато изпрати цели 5000 импулса, еквивалентни на дължината на пакета, бит M1029 ще бъде включен. Сега използвайте логиката на програмиране, за да отмените импулса <=> Set OFF M111 и изпълнете следващата стъпка, като даване на заповеди за рязане на опаковката, издухване на торбички,
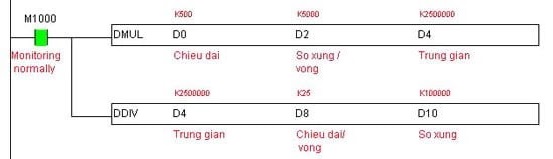
Вече знаем, че например зададеният параметър брой импулси/оборот е 5000 импулса. Това е необходимо условие за изчисляване на действителната дължина.
След като разполагаме с пълната механична част, трябва да изчислим повече и трябва действително да измерим или изчислим дизайна от самото начало, както следва: брой mm/оборот на вала на сервомотора. Тоест, когато валът на двигателя се завърти с 1 оборот, колко време се движи обемът на машината с 1?
Да кажем 25 мм/об. Оттам имаме формулата, съответстваща на дължината на изместване от 50 cm <=> 500 mm като:
Брой импулси за предаване = (зададена дължина) / (дължина / обороти) x (брой импулси / обороти)
=> Брой импулси за предаване = 500 / 25 x 5000 = 100 000 импулса.
Така че просто напишете командата за генериране на 100 000 импулса, моторът ще се завърти и ще накара машината да се движи 50 см.
Защото, ако извършите целочислено деление, остатъкът ще бъде отрязан. Тогава колкото по-късно, толкова по-голяма е грешката.
При реално измерване ще има известна грешка, но ще направи ненужния механичен дизайн за изчисляване на предавателното отношение в детайли.
За по-голяма точност можем да намалим дължината до по-малка стойност. След получаване на резултатите ние ще конвертираме в Cm или mm в зависимост от изискванията.
Да кажем, че пулсираме на 100Hz.
Да приемем, че номиналната скорост на двигателя е 3000 об/мин, а параметърът импулс/оборот е 5000 импулса/об.
=> Изчислете скоростта на двигателя при 100Hz?
Изчислението е както следва: 100Hz <=> 1 секунда предава 100 импулса => 1 минута предава броя на импулсите: 100 x 60 = 6000 импулса
=> броят обороти/минута при 100Hz е: 6000 / 5000 = 1,2 rpm
Защо е важно да се обърне внимание на номиналната скорост на двигателя, когато се изпълнява командата за управляващ импулс?
Да кажем при 3000 оборота, 5000 импулса/оборот
=> броят на импулсите, които трябва да бъдат предадени за 1 минута е: 3000×5000 = 15 000 000 импулса
=> броят на импулсите, които трябва да бъдат предадени за 1 секунда е: 15 000 000 / 60 = 250 000 импулса
=> Честотата на импулса за достигане на скорост от 3000 rpm е: 250 000 Hz = 250kHz
Така че, ако възпроизвеждаме честота > 250 kHz, това означава, че задвижването ще получи твърде много номинални импулси / сек => неконтролируемо,
причинявайки удар на двигателя, вероятно губейки импулси, причинявайки грешки в изчислената позиция.
Какъв ефект има честотата на импулса върху избора на PLC?
За всеки тип PLC ще бъде специално проектиран импулсен изход. Броят на импулсните изходи и изходната скорост (честота) са пропорционални на цената на продукта и ефективността на системата.
Ако приемем, че трябва да предаваме само 5 kHz, тогава просто изберете PLC с импулсна честота > 5 kHz.
Пример: DVP14SS211T : 10kHz импулсен изход
Или ако PLC избере генератор на импулси с ниска скорост, когато е необходима по-висока скорост, той няма да може да отговори.
Ако програмираме предавателя на по-висока скорост от разрешената скорост на PLC според горните изчисления, изходният импулс няма да реагира и може да причини загуба на импулс.
Каква е основната разлика между високоскоростен импулсен изход и нискоскоростен или без импулсен изход?
Импулсният изход е проектиран с високоскоростни полупроводникови компоненти като полеви транзистори (като Mos FET, ...)
Изходът не е в състояние да генерира високоскоростни импулси като релейния изход - поради бавната механична реакция и краткия механичен живот при бързо превключване, той не може да се предава с твърде висока скорост и не трябва да се използва дори за непрекъснато генериране на импулси на ниска скорост. Цикълът може да бъде 1 или повече от 1 секунда, но все пак причинява значително намаляване на живота на релето. Изходът не е в състояние да генерира високоскоростни импулси, но все пак може да бъде извеждан при по-ниски скорости чрез аналогови команди, което е изход на биполярен транзистор BJT.
Знанията за хардуер - електроника, моля, обменяйте директно или научете онлайн и книги.
И накрая, е необходимо да настроите електронната скоростна кутия P1-44 и P1-45, за да бъде точна с машината, имайте предвид, че делта сервото получава 100 000 импулса, след което може да се завърти на 1 оборот.
+ Множител P1-44: по подразбиране = 16.
+ Коефициент на разделяне P1-45: по подразбиране = 10.
Представител: Тран Дин Хиен
Parameter Setting for DELTA ASDA-B2 Servo Drive
P2-08 = 00010= RST
P0-02 Следи дали броят на изпратените и получени импулси е правилен, като
зададете този параметър.
SETTINGS : 02
Name: Drive status display
Value: 02
Description: Monitor if the number of sent and received pulse is correct by
setting this parameter.
In Weihong control system, the correct quantity of pulse sent by control card is
detected by pulse inspection in order to determine whether there is electrical
interference.
P1-00 Външен тип импулсен вход Pulse + direction negative mode
SETTINGS : 102
Name: External pulse train input type
Range: ZYX
Value: 102
Description:
X=2: pulse + direction
Z=1: negative logic
P1-01 Задаване режим на управление Position control
SETTINGS : 0000 CW 0100 CCW (reverse)
Name: Set control mode
Range: ZYX1X0
Value: 0000
Description:
Z=0: during control mode switching, DIO is maintaining the set value. Since
switching control mode is not used, Z=0.
Y=0: forward rotation (CCW) (from the view of load).
Y=1: the rotation direction is reversed.
X1X0=00: position control mode.
P1-44 & P1-45 Електронно предавателно отношение (числител)(N1) / (знаменател)
(M)
SETTINGS : 1 Когато не се използва многоелектронно предавателно отношение, P2-60
~ P2-62 не са необходими.
Name: Electronic Gear Ratio (Numerator)(N1) / (Denominator) (M)
Range: 1 ~ 32767
Value: To be calculated
Formula: N1/M = mechanical deceleration ratio × 4 × encoder pulses × pulse
equivalent / pitch
Формула: N1/M = коефициент на механично забавяне × 4 × импулси на енкодер ×
еквивалент на импулс / стъпка
Typical value: Encoder pulses=40000, pitch =5 mm, pulse equivalent=0.001 mm/p,
deceleration ratio = 1, N1=32,M=1, calculation as follows:
N1/M=40000×4×0.001/5=32/1
Description: When the multi-electronic gear ratio is not used, P2-60 ~ P2-62 are
not required.
P1-46 Настройка № на изходния импулс на детектора
SETTINGS : 20 ~ 4*10^4
Когато еквивалента на импулса е = 0,001 mm/p, стъпка=10 mm, без редуктор,
задаваме този параметър на 10000; когато стъпката е =5 mm, го задаваме на 5000.
Name: Detector output pulse No. setting
Range: 20 ~ 4*10^4
Value: To be calculated. The actual value is decided by PG divide ratio.
Description: It sets detector output pulse number.
Typical value: When pulse equivalent = 0.001 mm/p, pitch=10 mm, without reducer,
sets this parameter to 10000; when pitch=5 mm, sets it to 5000.
P2-10 Настройка на функцията за цифров вход DI1
Pin 9 Servo ON NO Contact
SETTINGS : 101
Name: Function setting for digital Input Pin 1 (DI1)
Range: X2X1X0
Value: 101
Description:
X1X0=01: digital input (DI1 = SON) corresponds to 9th pin of CN1.
X2=1: set DI1 input as NO (normally open) a-contact point.
P2-15 and 2-16 Функционална настройка за цифров вход DI6 и DI7
SETTINGS : 100
Фабричната настройка по подразбиране на DI6 и DI7 е NC (нормално затворен) вход
за ограничаване на сигнала; задвижването не може да работи без да е свързано към
пин 32 и пин 31 на CN1.
Name: Function setting for digital input pin DI6 and pin DI7
Range: X2X1X0
Value: 100
Description: Default factory setting of DI6 and DI7 is NC (normally closed)
limit signal input; drive can’t run without being connected to pin 32 and pin 31
of CN1.
X2=0: set DI6 and DI7 inputs as NC b-contact point.
X1X0=00: limit input of drive is not used.
P2-17 Функционална настройка за цифров входен щифт DI8
SETTINGS : 000 Не се използва външен EMG стоп вход
Name: Function setting for digital input pin DI8
Range: X2X1X0
Value: 000
Description: External EMG stop input is not used. .
P2-18 OUTPUT
SETTINGS : 108
DO1 съответства на щифт 6 и щифт 7, използвани като спирачен сигнал за позиция
на затягане на оста Z.
Name: Function setting for digital output pin DO1
Range: X2X1X0
Value: 108
Description: DO1 corresponds to the pin 6 & pin 7, used as clamping-position
brake signal of Z-axis.
X2=1: set DO1 output as NO (normally open) a-contact point.
X2=0: set DO1 output as NC (normally closed) b-contact point.
X1X0=08: set pin 6 and pin 7 as BK- and BK+ respectively.
P2-22 OUTPUT
SETTINGS : 007 servo alarm output
Name: Function setting for digital output pin DO5
Range: X2X1X0
Value: 007
Description: DO5 corresponds to pin 28 & pin 27, used as servo alarm signal.
X2=0: set DO5 output as NC b-contact point.
X1X0=07: set pin 28 and pin 27 as ALRM+ and ALRM- respectively.
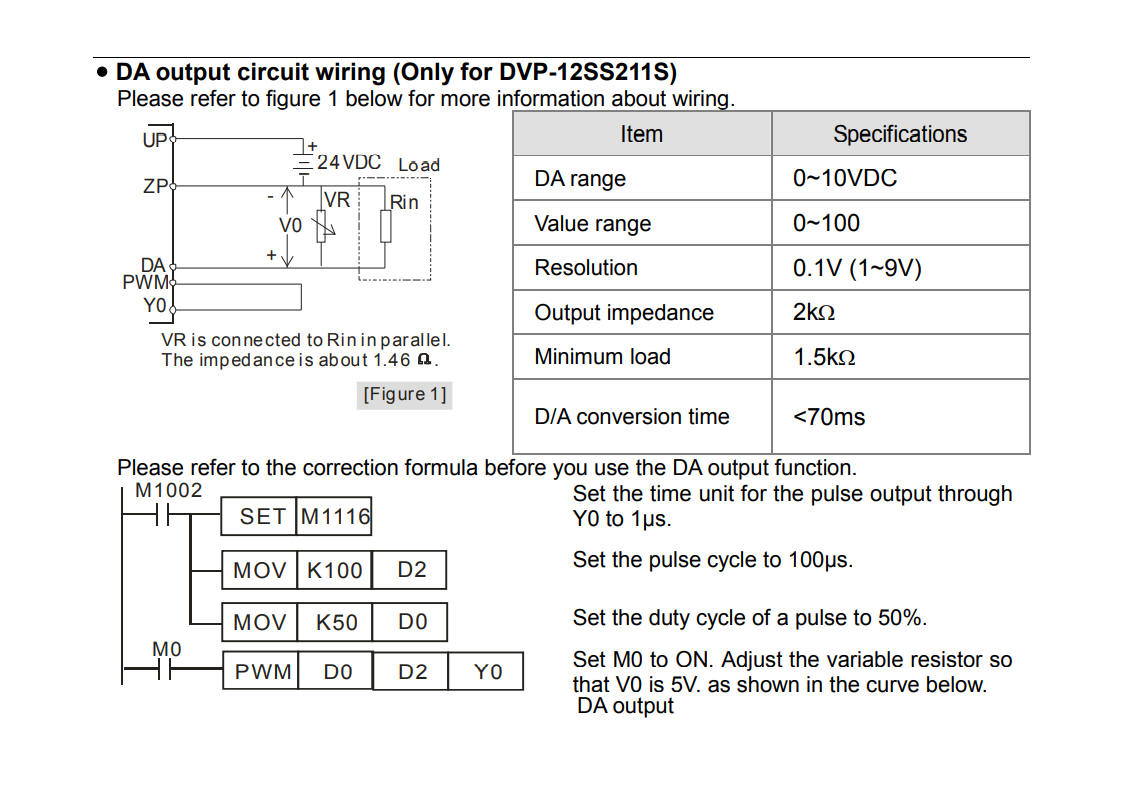
PWM